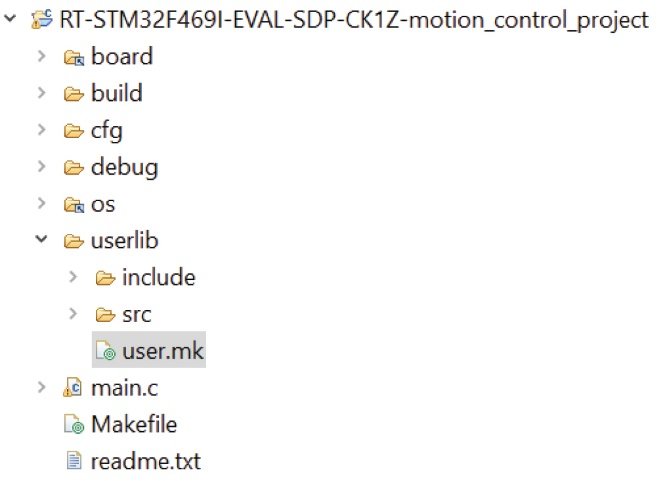
����ϵͳ��ϵͳ��Ƽ�飬�����Ա����Ϊ��������̼���д���룬��ȷ����ѡ�Ĵ���������ʵ������Ļ������ܡ��������ͨ���Ǽ�ʱ�ͷ�ζ�ġ�Ϊ�˽�������⣬����ͨ�����Ӳ���������̼���������ѡ���ϵͳ������ʹ�ò�����˼�롣������Ӳ��������������ʹ���������ɸ��ã����һ�������Ϊ����ʹ��δ����Ƶ�ͨ�ý�����������Ľ�ʹ�ù��Բ�����Ԫ��IMU����������Ϊһ��ʾ����˵�����ʵ�ֶ���Ӳ�������������Ǵ˷���Ҳ�������������͵Ĵ��������豸�� TheDriver��C��д������һ��Ŀ�������������˲��ԡ���ʻԱ��ʵ�ָ�¼���������ᵽ��ͼƬ�ʹ��룬�ɹ����߲鿴�� ��adis16500_rd_error_flag�ĸ�¼�е�ͼ10��ʾi�ù��ܵ�Ч�ʡ��˹��ܶ�ȡADIS16500_REG_DIAG_STAT�Ĵ����а����Ĵ����־�����δ�����������������Ϊ0����10�����ܵĴ�����˸ò�������ADIS16500_ERROR_FLAGS�ṹ������10�������ֶΣ�ÿ���ֶα�ʾ���˹��ܽ���ȡADIS16500_REG_DIAG_STAT�Ĵ�������ʹ���ض��Ĵ���������ÿ���Ĵ��������ҵ���1ʱ���ṹ����Ӧ�ֶν�����Ϊ�档 ��ADIS16500_RD_TEMP����һ��pag andar��ȡ�¶ȣ���ʵ�ַ����ȼ��ٺ������ǣ��й���ϸ��Ϣ����μ���ϵ�еĵ�һƪ���£�����ȡ���ڡ浥Ԫ�б�ʾ���������ֵ������16λ�Ĵ���ADIS16500_REG_TEMP_OUT�С�֮�����ݽ�ת��Ϊ���ߵIJ��䡣���������в����IJ�Ʒ�������¶ȳ߶�facTOR���ڡ�C/LSB����������ڡ�C�����������֣�����ָ���м�¼Ϊ���롣�ù��ܵ�ʵ�ֿ��ڸ�¼�е�ͼ9���ҵ��� ��ADIS16500_GET_TS_USEC�˹��������Ԧ�s��ȡIMUʱ�����ʵ�����ķ�����ADIS16500_RD_TEMP������ȫ��ͬ���й���ϸ��Ϣ������ĸ�¼�е�ͼ9�� ��ADIS16500_RD_DATA_CNTR�˳����ȡOutpu Datumt��ʵ���ϣ�����ͨ����ȡ��Ϊadis16500_reg_data_cntr�ļĴ�������ɡ����Ĵ����ﵽ�����ֵʱ�������Դ�0�����������ù��ܵ�ʵ�ֿ��ڸ�¼�е�ͼ9���ҵ��� ��ADIS16500_WR_ACC_CALIB�˹�������ִ���Զ���ƫ�����������Աʹ�ô˹��ܣ����Խ�ƫ�������ӵ���������ݼĴ����ж�ȡ�������У��Ӷ�����X��Y��Y��Z������У��X��Y��Z���������˹��ܵ�Ŀ���Ǵ�floaת����ĵ�Ϊ��������ֵ��Ȼ�������ֵpand pand���ӵ����������������в�������ڸ�¼�е�ͼ11���ҵ�����������������ֵ��Ҫд�ڡ�ƫ�á��Ĵ����С����磬����X�ᣬ��Ҫ��д�����Ĵ�����adis16500_reg_x_accel_bias_l���²�16λ����ADIS16500_REG_X_X_ACCEL_BIAS_BIAS_H���ϸ�16λ�������߶���y���z�ᶼ����ȷ�ģ�ÿ���ᶼ����Ӧ��ƫ�üĴ�����Ҫ�������Ƿ���ȷִ�У���ȷ������IMU������ʱ��Z�ᴹֱ�����ա�����������£�X���Y��ļ��ٶ�ֵ�ӽ�0��Z��ֵ�ļ��ٶȽӽ�-9.81 m/s2���Cg��������У������ͨ��У�ṹ������X��Y��Z�ֶε��ڨC9.81 m/s2�����Ҷ�ȡУ�Ľ��Ϊx = �C9.81; y = �C9.81; z = 0������ζ��Уƫ�ƺ���Ҳ���Թ���mally�� ��ADIS16500_WR_GYRO_CALIB��������������ص�У���ܵĵ�����ʵ�����ķ�������ٶȵĹ�����ȫ��ͬ���������ڣ������ǵ�У��Ҫ�������ݱ��ϵ�˵���Լ�ʹ����Ӧ��������ƫ�ƼĴ������С����IJ�����IMU��������������������/�̼��ṹ�������κ����͵Ĵ���������ˣ�Ϊ�˻�����д�������ͨ��֧�֣���ֻ��Ҫ���ݴ�������������֮���ͨ��Э�飨����SPI��I2C��UART�ȣ����е���������������������Ȼ��Ч����Ϊ������¼�IJ�����ͨ��ͨ��Э�鷢�ͺͽ��յ��ġ������йش�������������֮���Ӳ�����ӵĻ���˵��֮�⣬�������Ŀ�н��ܺ�ʹ����������MCu���������͵�Ԫ���ṩ�й���δ������̼��ǶȽ���������������ָ�ϡ�ͼ1��Ŀ�ļ��е���Ŀ�ṹ��������û�б�����֯�ṹ��ͼ1��ʾ���ļ��еĽ���ṹ�� Userlib�ļ��а������д��������������ڴ�ʾ���У�ֻ��IMU�����������������������Ŀ��������Ĵ���������ʵ��������ͬ�ķ�ʽ��֯������ Userlib���������ļ��У�������SRC�����ļ��а�����������ı�ͷ�ļ������ڴ�ʾ���У�adis16500.h��SRC����Դ�ļ�����ADIS16500.C������һ��makefile��ָUserlib���渽��ָ�����������ʾͼ2����λ��Main.C������Ӧ�ò��С� MakeFile����user.mk����ͼ3��������115���еĺ�ɫ�»�����ʾ����makefile��.mk���У������Ա���Խ���������ӿ�����Ӧ�ó���ation�㣨����Main.C�У������Ե��ô�����������������г��湦�ܡ�����������Ӧ�ó����ʹ������������֮�佨�����ӡ���������������ADIS16500.H���Ľӿڿ�����Ӧ�ò�ʶ����ˣ���Ӧ�ó�����У���ͨ������Ŀ�ʼ�����������������������Χ��������֮������ӡ���ʹ��IMU���������ض�����£���������������SPI������ϵͳ�ӳ���main.c�ļ��ж��壬�總¼�е�ͼ2��ʾ������������Ա��ȫ�������������ͷ�ļ��е�ԭ�ͣ������Ǹ�¼ͼ3������ʾ��ԭ�͡�����������������Χ���������ṩ���ڲ����ܣ�����spiselect��spisend��superceive��spiunelect��chthdsleepmicroseconds����ˣ�SPI����������ϵͳ�ӳٵĽ����ߴ�����ͼ2��ʾ�ĸ�¼�е�ͼ2��ʾ����Χ������ʹ�������������֮������ӽ��������ʼ - UP�ṹ�������ǽ���������������Ŀ���������̡��������Ӵ������л�ȡ����������Ա����ʹ��ADIS16500_RD_ACC��ADIS16500_RD_GYRO����������ĵ�����������������û�о��Ե�һ����̣�ͼ4���ṩһ��ʾ����ͼ4�����������ȡ��ʾ���е�ʾ����Main.c����һ������ѭ������ѭ��ʼ�ն���Ϊ_ADIS16500_DATA_READY�IJ�����̬���������������ñ�����ص�������������DR���Ÿ�ʱ������������ʵ������ζ�ſ���ʹ�������ݡ�����������£�����������ΪADIS16500_RD_ACC��ADIS16500_RD_GYRO������ͨ��ȫ������IMU�������������Ա��2 kh�������ODR���������ʻ�ȡ����z�����۱��Ľ����˼�ʻԱ�Ĺ����Լ����ͨ��Indepen PropecturesHardware�Ի��������ļ��ɡ�������Ӳ���������������������������ظ�ʹ�õ�һ��������������Giocomo Paterniani������ӵ�в������Ǵ�ѧ������ҽѧ����ѧλ����ӵ��Ħ���� - ���¡��������Ǵ�ѧ�ĵ��ӹ���˶ʿѧλ����ҵ������Modena-Reggio��ѧ�������Ǵ�ѧ�����о�Աһ�ꡣ 2022��4�£���������ADI�о����γ̣������о����ֳ����빤��ʦ�� 2023��4�£�����ΪFae��






 �Ƽ�����
�Ƽ�����







){kind=link}
){kind=link}
){kind=link}
){kind=link}